Publications
For a more updated list, visit my ReasearchGate and/or GoogleScholar.
Conference Paper: IROS 2022 The Concept of Rod-Driven
Locomotion for Spherical Lunar Exploration Robots
Coming Soon
Paper: A Modified Model Reference Adaptive Controller (M-MRAC) Using an Updated MIT-Rule for the Altitude of a UAV
MDPI Electronics
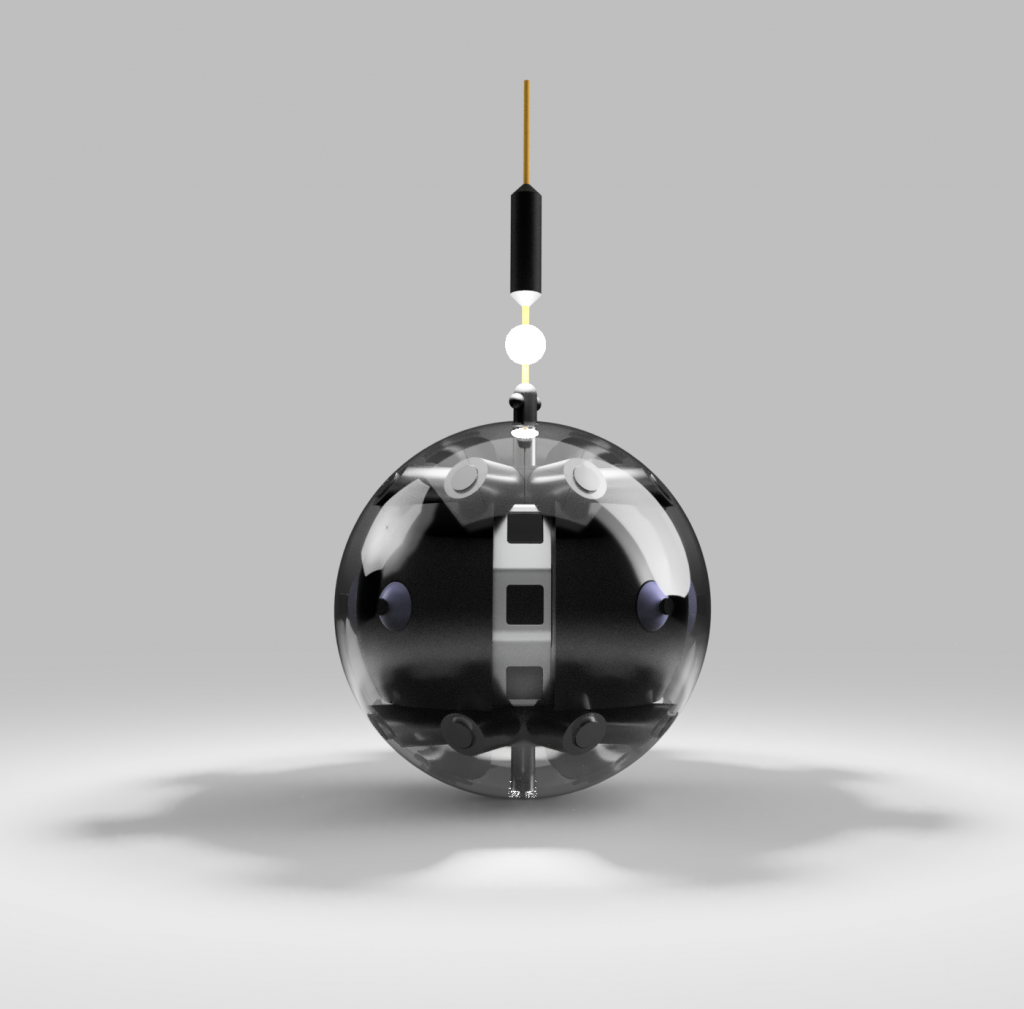
Technical Report: DAEDALUS
Descent And Exploration
in Deep Autonomy of
Lava Underground Structures
ISBN: 978-3-945459-33-1
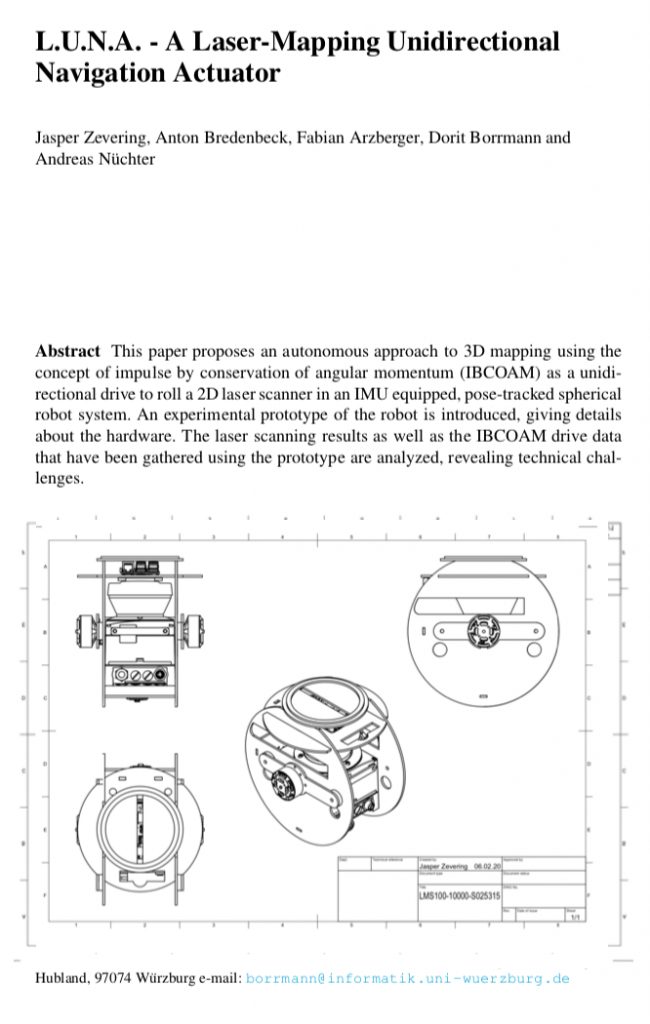
Confrence-Paper ISER2020: L.U.N.A
A Laser-Mapping Unidirectional Navigation Actuator
„Experimental Robotics“ The 17th International Symposium
Page 85
ISBN: 978-3-030-71151-1
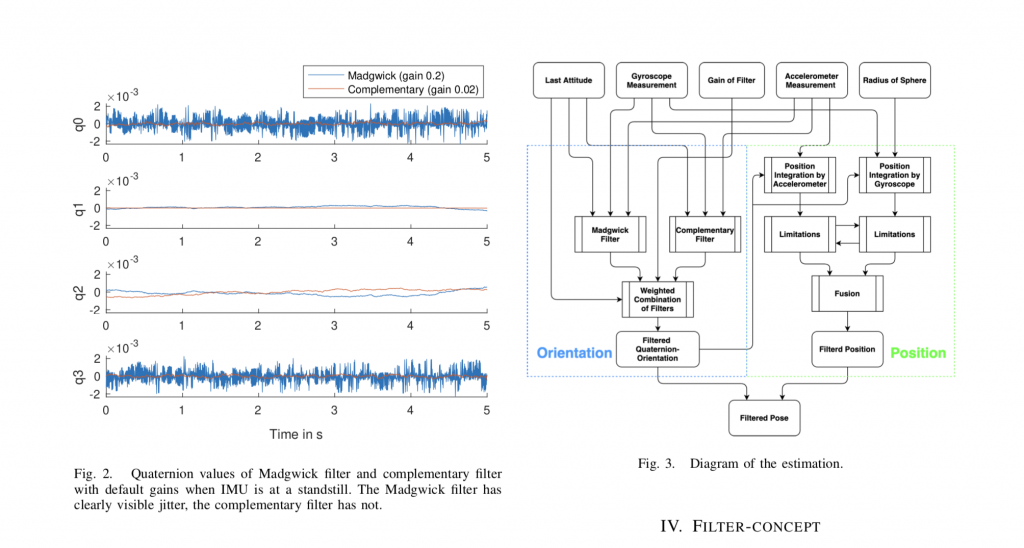
IMU-based pose-estimation for spherical robots with limited resources
2021 IEEE International Conference on Multisensor Fusion and Integration
https://robotik.informatik.uni-wuerzburg.de/telematics/download/mfi2021.pdf
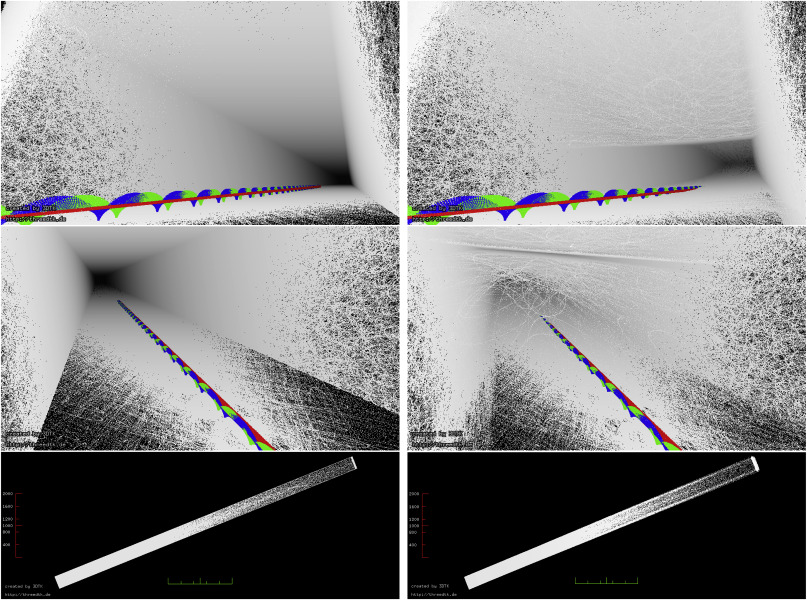
Paper: Spherical Robots for Mobile Mapping in Human Made Environments
Map optimization for spherical robots.
ISPRS Open Journal of Photogrammetry and Remote Sensing
https://doi.org/10.1016/j.ophoto.2021.100004
https://www.sciencedirect.com/science/article/pii/S2667393221000041
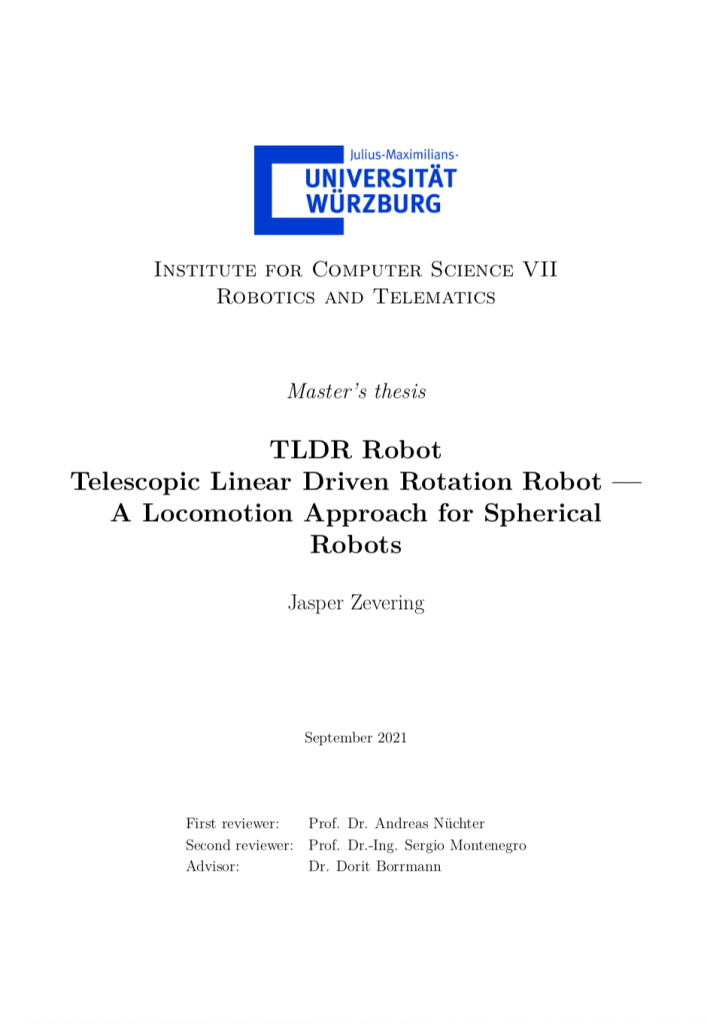
Master-Thesis: Telescopic Linear Driven Rotation, a locomotion approach for spherical robots
Bachelor-Thesis: Adaptive Altitude Controller for a Quadrocopter
Online-Conference lpsc2021 (52nd Lunar and Planetary Science Conference 2021):
Paper:
Marius Hills Skylight Hazard Characterization as a Possible Landing Site for Lunar Subsurface Exploration
https://lpsc2021.ipostersessions.com/Default.aspx?s=B7-96-82-29-53-0F-D5-C1-72-62-B5-28-0A-ED-09-B8#
Lunar Caves Exploration with the DAEDALUS Spherical Robot
https://lpsc2021.ipostersessions.com/Default.aspx?s=30-62-E3-BA-65-97-5E-F3-C0-55-CA-B8-E8-EE-E6-AE